试题详情
现有一个大小为n*n的平面矩阵(从上到下从左到右编号为1~n*n),矩阵中有诸多障碍物。有两个机器人分别为1号和2号,其中1号位于左上角且面朝右侧,2号位于右下角且面朝左侧。现在机器人需要按照规则进行K轮运动,规则如下:
①1号和2号机器人需要交替运动,即第一轮由1号进行运动,第二轮则由2号进行运动,第三轮由1号进行运动……以此类推直至第K轮。
②每轮运动时,机器人将先判断前方是否可以前进,若无法前进,则不断顺时针旋转90°至可以前进为止,随后前进直至停止,由另一个机器人开始下一轮运动。
③机器人在前进过程中遇到边界、障碍物或者另一个机器人时都将停止。
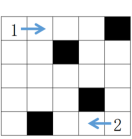
如图a所示,机器人1号和2号分别位于左上角和右下角,且分别朝向右侧和左侧,黑块表示障碍物,当进行了4轮运动后,状态如图b所示。
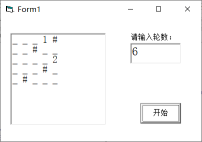
编写程序,启动后随机生成矩阵并在List1中输出,其中"#"表示障碍物,"_"表示可以行走的空格子,机器人用数字1和2表示。在文本框Text1中输入轮数K,点击按钮Command1,在列表框List1中输出K轮后的矩阵。程序界面如图c所示。
|
图a |
图b |
图c |

知识点

参考答案
采纳过本试题的试卷