彩虹是由阳光进入水滴,先折射一次,然后在水滴的背面反射,最后离开水滴时再折射一次形成的,形成示意图如图所示,一束白光L由左侧射入雨滴,a、b是白光射入雨滴后经过一次反射和两次折射后的光路图,其中两条出射光(a、b是单色光).下列关于a光与b光的说法中正确的是( )
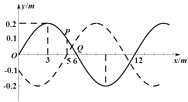
如图所示为一列沿x轴正方向传播的简谐横波,实线为t0=0时刻的波形图,P点是x=5m的质点,Q点是x=6m的质点,虚线为t1=0.5s时的波形图,波的周期T>1.0s,则下列说法正确的是( )
如图所示,一平行光滑金属导轨水平放置,导轨间距L=0.5m,在AB、CD间有一匀强磁场,磁感应强度B=0.2T,理想变压器匝数之比n1:n2=2:1,R1=R2=R3=1Ω.一导体杆与两导轨接触良好,并在外力做作用下在ABCD区域内做往复运动,其运动过程与弹簧振子做简谐运动的情况相同,图中O位置对应于弹簧振子的平衡位置,导体杆经过O处时速度v=10m/s.若两导轨和杆的电阻不计,图中电表均为理想电表,则下列说法中正确的是( )
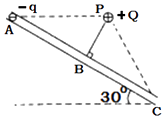
如图所示,光滑绝缘细管与水平面成30°角,在管的上方P点固定一个点电荷+Q,P点与细管在同一竖直平面内,管的顶端A与P点连线水平,A,P间距离为L.带电荷量为﹣q的小球(小球直径略小于细管内径)从管中A处由静止开始沿管向下运动,在A处时小球的加速度大小为a,图中PB⊥AC,B是AC的中点,不考虑小球电荷量对+Q形成的电场的影响.则在+Q形成的电场中( )
如图甲所示,两根相距L=0.5m且足够长的固定金属直角导轨,一部分水平,另一部分竖直.质量均为m=0.5kg的金属细杆ab、cd始终与导轨垂直且接触良好形成闭合回路,水平导轨与ab杆之间的动摩擦因数为μ,竖直导轨光滑.ab与cd之间用一根足够长的绝缘细线跨过定滑轮相连,每根杆的电阻均为R=1Ω,其他电阻不计.整个装置处于竖直向上的匀强磁场中,现用一平行于水平导轨的恒定拉力F作用于ab杆,使之从静止开始向右运动,ab杆最终将做匀速运动,且在运动过程中,cd杆始终在竖直导轨上运动.当改变拉力F的大小时,ab杆相对应的匀速运动的速度v大小也随之改变,F与v的关系图线如图乙所示.不计细线与滑轮之间的摩擦和空气阻力,g取10m/s2 . ( )
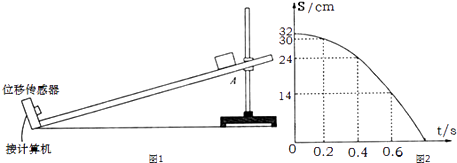
为了测量木块与木板间的动摩擦因数μ,某小组使用位移传感器设计了如图1所示实验装置,让木块从倾斜木板上一点A由静止释放,位移传感器可以测出木块到传感器的距离S,位移传感器连接计算机,描绘出滑块相对传感器的距离S随时间t变化规律如图2所示.(sin37°=0.6,cos37°=0.8,g=10m/s2)
现有一电流表 ,量程30mA,内阻r1约为6欧,请用下列器材测量其内阻值r1 , 要求方法简捷,有尽可能高的测量精度.
A.电流表 ,量程50mA,内电阻r2约10Ω
B.电压表 ,量程15V,内阻rV=15kΩ
C.定值电阻RO=9Ω′
D.保护电阻R1=50Ω
E.滑动变阻器R2 , 阻值O~30Ω,额定电流0.3A
F.滑动变阻器R3 , 阻值0~5Ω,额定电流0.3A
G.电池组,电动势为3V,内电阻约0.5Ω
此外还有单刀电键若干和导线若干,供需要时选用.
据悉宜宾市新采购的一批公交车是采用“插电式混合动力”,有利于节能减排与城市环境保护,拥有较高的舒适度,深受市民喜爱.这款车在设计阶段要对其各项性能进行测试.该款公交车在某次性能测试中,如图甲显示的是牵引力传感器传回的实时数据随时间变化关系,但由于机械故障,速度传感器却只传回了第20s以后的数据,如图乙所示.已知公交车质量为4×103kg,若测试平台是水平的,且公交车是由静止开始作直线运动.假定公交车所受阻力恒定,求:
如图所示,天花板上有固定转轴O,长为L的轻质绝缘杆,一端可绕转轴o在竖直平面内自由转动,另一端固定一质量为M的带电量为q(q>0)的小球.空间存在一竖直向下场强大小E= 的匀强电场.一根不可伸长的足够长绝缘轻绳绕过定滑轮A,一端与小球相连,另一端挂着质量为m1的钩码,定滑轮A的位置可以沿OA连线方向调整.小球、钩码均可看作质点,不计一切摩擦.(sin37°=0.6,cos37°=0.8,g=10m/s2)
如图所示,在xOy平面内,MN与y轴平行,间距为d,其间有沿x轴负方向的匀强电场.y轴左侧有垂直纸面向外的匀强磁场,磁感应强度大小为B1;MN右侧空间有垂直纸面的匀强磁场(磁场方向未标出).质量为m、电荷量为q的粒子以v0的速度从坐标原点o沿x轴负方向射入磁场,经过一段时间后再次回到坐标原点,此过程中粒子两次通过电场,在电场中运动的总时间t总= .粒子重力不计,求:
 ,量程30mA,内阻r1约为6欧,请用下列器材测量其内阻值r1 , 要求方法简捷,有尽可能高的测量精度.
,量程30mA,内阻r1约为6欧,请用下列器材测量其内阻值r1 , 要求方法简捷,有尽可能高的测量精度. ,量程50mA,内电阻r2约10Ω
,量程50mA,内电阻r2约10Ω ,量程15V,内阻rV=15kΩ
,量程15V,内阻rV=15kΩ