①动力=阻力
②动力×动力臂=阻力×阻力臂
③
④动力×支点到动力作用点距离=阻力×支点到阻力作用点距离
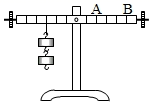
改变图中A、B点的位置以及钩码的数量,得到杠杆平衡时的相关数据如表:
动力/N
OA长度/cm
阻力/N
OB长度/cm
3
2
1
6


 金属镊子
金属镊子 家用多功能小铡刀
家用多功能小铡刀 碗夹
碗夹 筷子
筷子 道钉撬
道钉撬 钢丝钳
钢丝钳 天平
天平 扫帚
扫帚 瓶盖起子
瓶盖起子 筷子
筷子 镊子
镊子